
The Gait Cycle – Walking vs Running
The Gait Cycle In Running
Part 1: It ain’t just walking fast!
 One of the little ‘holes’ in clinical-knowledge that I encounter in my teaching and lecturing is that it is not always realised that the running gait cycle isn’t like the one in walking. The way in which we transfer our centre of mass (CoM) from step to step is quite different.
One of the little ‘holes’ in clinical-knowledge that I encounter in my teaching and lecturing is that it is not always realised that the running gait cycle isn’t like the one in walking. The way in which we transfer our centre of mass (CoM) from step to step is quite different.
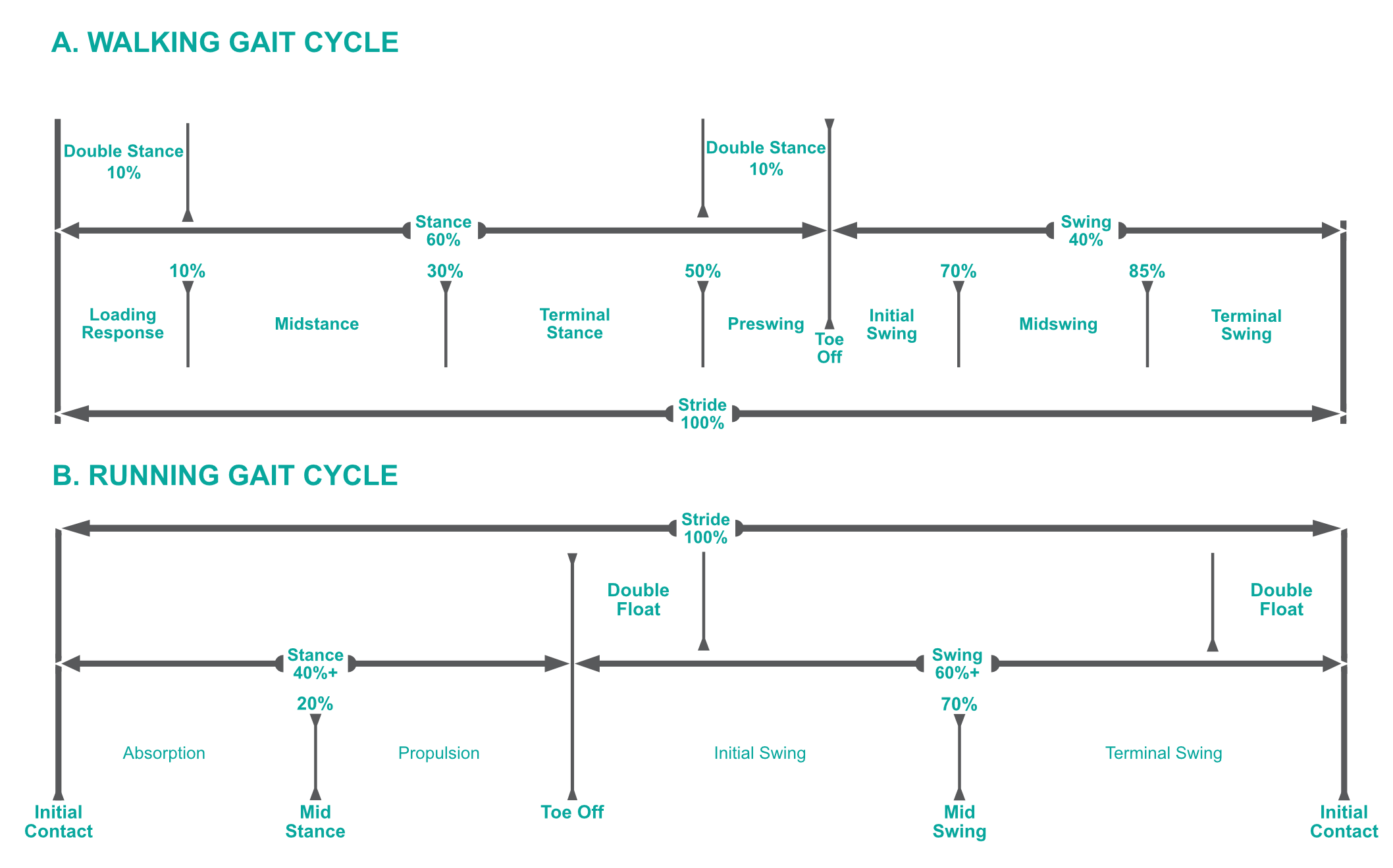
Similarities are that there is a stride from contact to contact phase, and a step of one foot stance phase. Both walking and running involves a breaking contact phase and an acceleration terminal stance phase, but the movements of the CoM of the body in running are quite different. In running there is no double stance phases when both feet are on the ground, but instead, there are float phases where both feet are off the ground.
When we walk there are three mechanisms by which we move our CoM forward. The first is during late swing phase when our flexing hip and extending knee swings the shank (lower leg) forward at the knee with hip flexion, drawing our body’s CoM along behind it by momentum. The faster we swing the leg forward the more we are pulled forward and tip downwards to the next step by swing leg’s momentum and centrifugal forces.

The second method is the vaulting action that occurs over the foot once it is in full ground contact, with muscle action of hip and knee extension motion occurring to extend our leg and pull us forward over the foot to absolute midstance point when the leg reaches its functional longest. The hip and the leg extend under the activity of gluteus maximum and quadriceps to lengthen the leg, taking the CoM of the body to its highest point over the leg is its most extended position in gait.
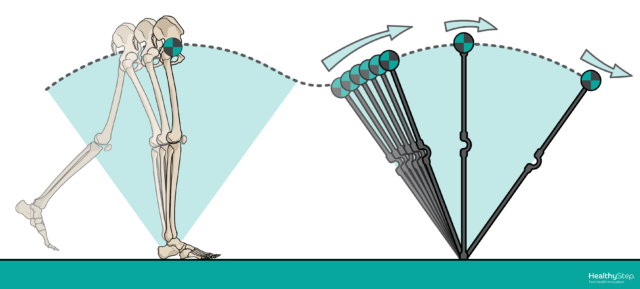
From this CoM high-point, our CoM is picked up and carried anteriorly by the forward momentum of the opposite swing limb as our centre of mass passes in front of the ankle, and the swing limb passes in front of the support limb. This forces the vaulting action over the foot at the ankle as the CoM falls forward via gravity and is drawn forward by momentum. At the end of this vaulting period, the heel must lift off the ground and the foot to plantarflex to allow the swing leg to draw the trailing hip into further extension increasing stride length.
Heel-lift is assisted by the third mechanism of powerful ankle plantarflexion, which gets the CoM of the trailing leg tipping forward to reduce the amount of hip flexor muscle activity necessary to get the leg swinging off the ground. Weak ankle plantarflexor power at heel lift results in the need for more hip activity.
If we fall forward enough out heel pitches off the ground without power from the ankle plantarflexors, just through passive soft tissue tension around the ankle. The argument goes that we don’t propel forward off the foot in terminal stance and therefore don’t really have a ‘propulsive phase’. In healthy situations, we do push-off the ground through a combination of power generated from the ankle muscles that is converted into a ground reaction force (GRF) at the forefoot through the foot stiffening and plantarflexing at the midfoot. This increased GRF important to our mechanical efficiency. However, this action drives the CoM of the leg forward and up and assists the anterior/horizontal plane progression of the body’s CoM, but as stated again most of the CoM of the body’s progression is drawn forward by swing phase momentum and gravity pulling the CoM forward and down into the ground to the next step. The ankle power and foot stiffening reduces hip activity and improves efficiency, but the heel will lift during gait, even without an Achilles tendon when the CoM has moved far enough forward and through enough hip muscle activity, even if the Achilles has been ruptured.
Walking gait, therefore, consists of initial contact (breaking and start of loading), usually on the heel with ankle plantarflexion to the forefoot loading response. In early midstance we extend our leg and raise our CoM. In late midstance we allow our CoM to fall and to be drawn forward by opposite swing limb. In terminal stance when we stiffen the foot, plantarflex the ankle and midfoot and lift the heel off the ground we assist in driving the leg’s CoM forward to help get the leg ready to swing forward in initial swing, assisted by the hip muscle activity. Then we swing this leg forward in the initial swing phase under hip flexor activity, swing past the other leg in midswing, and then use the forward momentum of our swing leg while we extend the knee under quadriceps activity to draw the CoM of the body forward to the next step during terminal swing.The period of initial contact phase on one foot occurs as the opposite foot is in terminal stance, with heel lift initiating a drop of about 1cm onto the heel of the opposite leg to initiate this double stance phase.The slower we walk the longer this cross over or double limb stance phase lasts. If we move so slow that double limb stance phase lasts forever we are standing still! The faster we walk the shorter the double limb phase lasts and if we move fast enough we don’t have a double limb stance phase, and we are in fact now running! This changes how we now move our CoM during the stance phase and we have a new phase when neither foot is in contact with the ground, known as the float phase!